Az emberi kéz elképesztően összetett - annyira, hogy a legtöbb modern robotnak és mesterséges intelligencia rendszernek nehézséget okoz megérteni, hogyan is működik valójában. Bár a gépek már viszonylag jól boldogulnak az objektumok megragadásával és cseréjével, a célok tényleges manipulálása (például összeszerelés, átrendezés és csomagolás) nagyrészt még mindig kihívást jelent. Azonban mostanában kutatók egy rendkívül ügyes robotot hoztak létre, miután rájöttek, hogy kevesebb, nem pedig több érzékelési adatra van szükségük.
A Columbia Mérnöki Karának egy csapata épp most mutatta be az ötujjas robotikus "kezet", amely kizárólag fejlett tapintási érzékére és motoros tanulási algoritmusaira támaszkodik a nehéz tárgyak kezeléséhez, nincs szüksége vizuális adatokra. Ennek köszönhetően az új koncepció a közös optikai problémák, mint például a gyenge megvilágítás, az elrejtés vagy akár a teljes sötétség tekintetében is teljesen ellenálló.
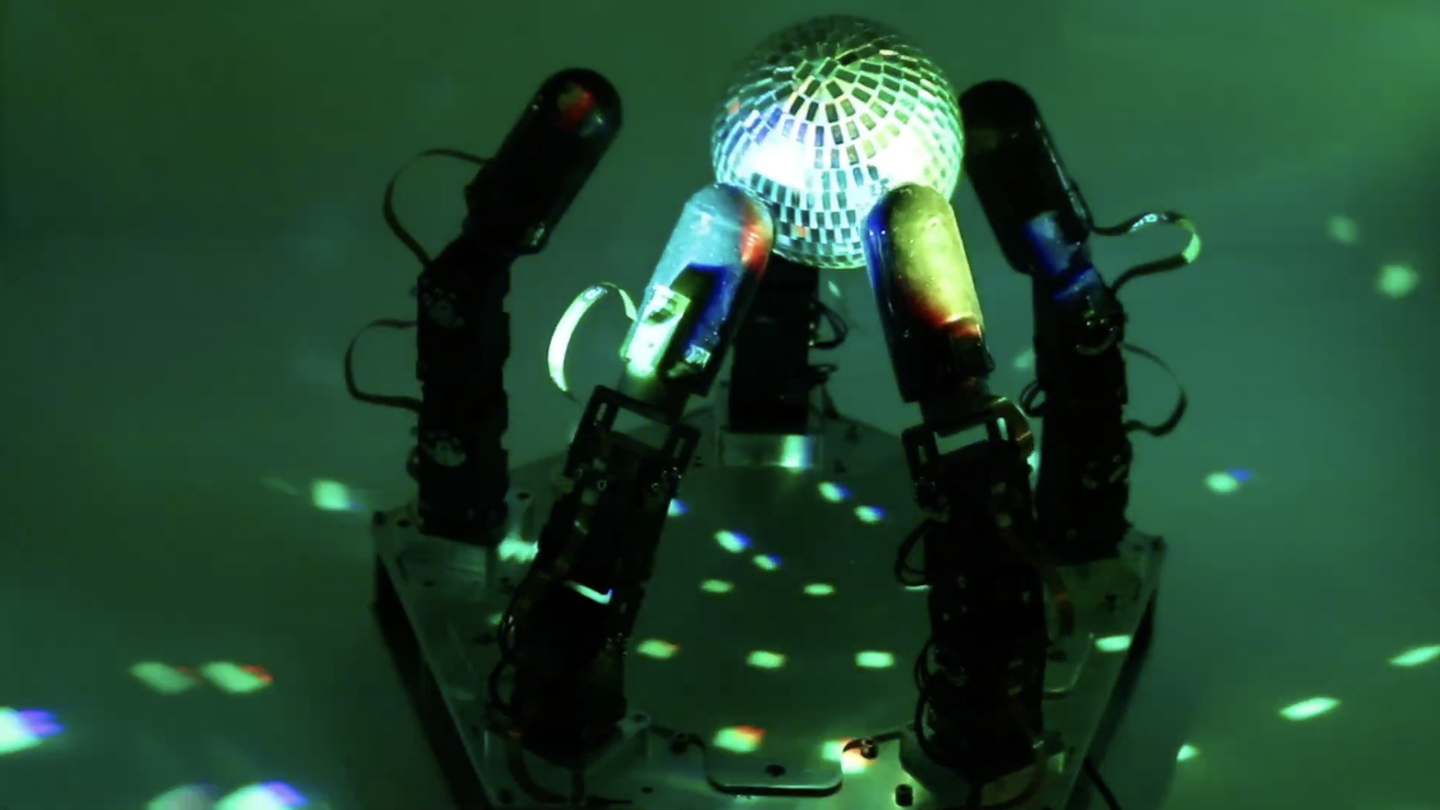
Az új robotujjak mindegyike rendelkezik rendkívül érzékeny tapintó szenzorokkal, valamint 15 függetlenül működtethető ízülettel. Olyan rendellenes alakú tárgyakat, mint például egy mini diszkógömb, elhelyeztek a kézben, hogy a robot forgassa és manőverezze azokat anélkül, hogy leesnének. A robot a "szubmilliméteres" tapintási adatok mellett a "propriocepción" alapult. A "hatodik érzéknek" is nevezett propriocepció magában foglalja az olyan képességeket, mint a fizikai helyzet, az erő és a saját mozgás. Ezeket az adatpontokat egy mély erősítő tanulási programba táplálták, amely "modern fizikai szimulátorok és párhuzamos feldolgozók" segítségével néhány óra alatt képes volt körülbelül egy évnyi gyakorlási időt szimulálni - közölte a Columbia Mérnöki Kar egyik nyilatkozata.
Bejelentésükben Matei Ciocarlie, a mechanikai mérnöki és számítástechnika tanszékek társult professzora elmagyarázta, hogy "a terület irányító célja továbbra is az asszisztens robotika a háztartásban, ami az igazi ügyesség próbaterülete". Bár Ciocarlie csapata bebizonyította, hogy ez lehetséges vizuális adatok nélkül, tervezik, hogy végül beépítik ezt az információt a rendszereikbe. "Amint hozzáadjuk a vizuális visszajelzést a tapintáshoz, reméljük, hogy még nagyobb ügyességet érünk el, és egy napon megközelíthetjük az emberi kéz replikációját" - tették hozzá.