Kifejlesztették az első statisztikailag reális közúti szimulációt a Michigan Egyetem kutatói, melyet jelenleg egy területre fokuszáltak, de a jövőben szeretnék kiterjeszteni más vezetési helyzetekre is, hogy teszteljék az önvezető járművek szoftvereit.
A szimuláció egy gépi tanulási modell, amelyet az Ann Arbor déli részén található egyik legveszélyesebb kereszteződésen, a Michigan állambeli balesetek szempontjából jól ismert helyszínen gyűjtött adatokkal képeztek ki. A Neural Naturalistic Driving Environment vagy NeuralNDE néven ismert modell ezeket az adatokat alakította át a mindennapi vezetői tapasztalatokat szimuláló modellé. Az ilyen virtuális utakra azért van szükség, hogy az önvezető járművek szoftvereinek biztonságosságát ellenőrizzék, mielőtt más autók, kerékpárosok és gyalogosok kereszteznék az útjukat.

"A NeuralNDE reprodukálja a vezetési környezetet, és még fontosabb, hogy reálisan szimulálja ezeket a biztonságkritikus helyzeteket, hogy értékelni tudjuk az önvezető járművek biztonsági teljesítményét" - mondta Henry Liu, a civilmérnöki szak professzora és a Mcity nevű, az UM által vezetett közös kutatási partnerség igazgatója.
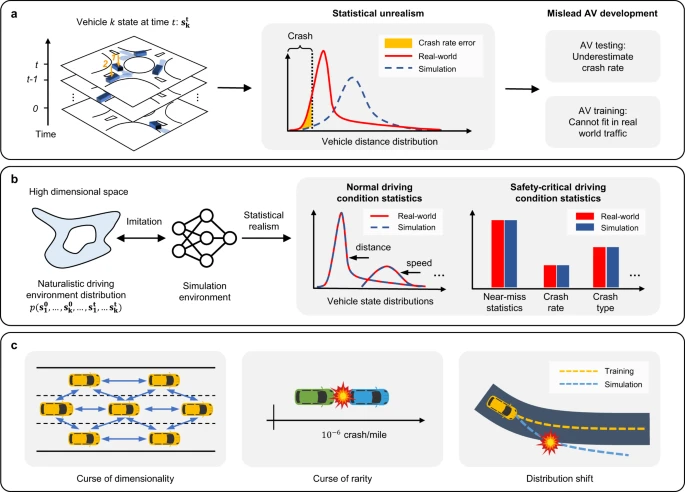
A biztonságkritikus események, amelyekben a vezetőnek szempillantások alatt döntést kell hoznia és cselekednie, nem olyan gyakoriak. A vezetők sok órát is vezethetnek olyan események között, amelyekben rákényszerülnek, hogy rátapossanak a fékpedálra vagy félrerántsák a kormányt, és minden eseménynek megvannak a maga egyedi körülményei. Ezek együtt képezik az útjaink szimulációjának két korlátját, melyeket a "ritkaság átka" és a "dimenzionalitás átka" néven ismernek. A dimenzionalitás átka a vezetési környezet bonyolultságából ered, ideértve olyan tényezőket, mint az útburkolat minősége, az aktuális időjárási viszonyok és a gyalogosok, kerékpárosok és más közlekedők különböző típusai.
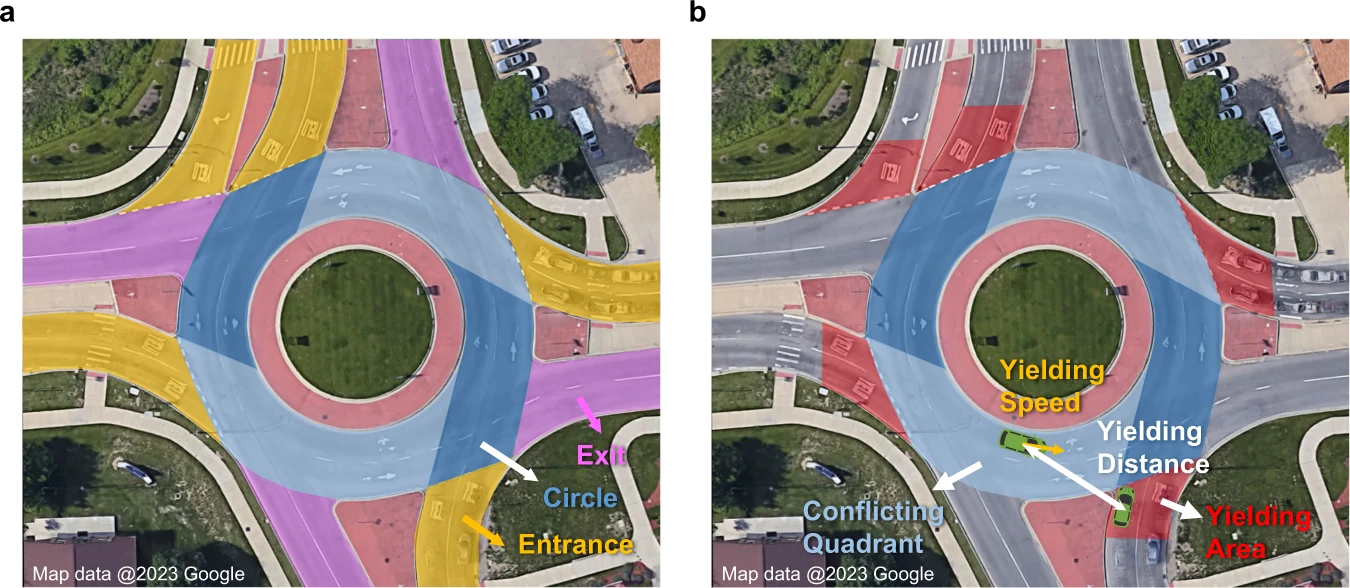
Az összesítéshez a csapat mindent megpróbált látni. Érzékelőrendszereket szereltek fel a villanyoszlopokra, amelyek folyamatosan gyűjtenek adatokat az Ann Arbor déli részén található State Street/Ellsworth Road körforgalomnál. "Azért választottuk ezt a helyszínt, mert a körforgalmak nagy kihívást jelentő városi vezetési helyzetek az önvezető járművek számára. Egy körforgalomban a vezetőknek spontánul kell tárgyalniuk és együttműködniük más vezetőkkel az áthaladás során. Emellett ennek a konkrét körforgalomnak magas a forgalmi terhelése, és két sávos, ami tovább bonyolítja a helyzetet" - mondta Xintao Yan, civil- és környezetmérnöki szakos hallgató.
A NeuralNDE a CCAT Safe AI Framework for Trustworthy Edge Scenario Tests, vagy SAFE TEST kulcsfontosságú eleme. Ez a rendszer, amelyet Liu csapata fejlesztett ki, mesterséges intelligenciát használva csökkenti az önvezető járművek biztonságának biztosításához szükséges tesztelési kilométereket 99,99%-kal. Gyakorlatilag megszünteti a "ritkaság átkát", és ezáltal ezer alkalommal gyakrabban vezeti be a biztonságkritikus eseményeket, mint ahogyan azok a valós vezetésben előfordulnak.
Azonban ellentétben a teljesen virtuális környezettel, ezek a tesztek kevert valóságban zajlanak le zárt tesztpályákon, mint például az Mcity tesztpálya. A valós körülmények mellett az önvezető járművek megtapasztalják a virtuális vezetők, kerékpárosok és gyalogosok biztonságos és veszélyes viselkedését is. Ezen forgatókönyvek ellenőrzött környezetben történő tesztelésével az AV-fejlesztők finomíthatják rendszereiket, hogy jobban kezeljék az összes vezetési helyzetet.
A NeuralNDE nemcsak az AV fejlesztők számára előnyös, hanem a humán vezetői viselkedést tanulmányozó kutatók számára is. A szimuláció segítségével értelmezhetővé válnak az adatok arról, hogyan reagálnak a vezetők különböző forgatókönyvekre, ami segíthet a funkcionálisabb közúti infrastruktúra kialakításában. Az UM Transportation Research Institute 2021-ben 9,95 millió dolláros finanszírozást kapott az Egyesült Államok Közlekedési Minisztériumától, hogy bővítse az érzékelőkkel felszerelt kereszteződések számát. Ez a bevezetés bővíti a NeuralNDE képességeit és valós idejű figyelmeztetéseket nyújt a csatlakoztatott járművek vezetőinek.
A kutatást az Mcity, a CCAT és a UM Transportation Research Institute finanszírozta. Az 1965-ben alapított UMTRI globális vezető a multidiszciplináris kutatásban és választott partner a ipari vezetők, alapítványok és kormányzati ügynökségek számára a biztonságos, egyenlő és hatékony közlekedés és mobilitás előmozdításában.